

PD型伺服纠偏控制系统
| 名称: | PD型伺服纠偏控制系统 |
| 型号Type: | EPC-A10 |
| 驱动方式: | 伺服驱动 |


EPC-A10 伺服纠偏控制系统
EPC-A10伺服纠偏控制系统采用高速32位CPU驱动直流伺服驱动器和积分变量PI调节算法,无超调量。高纠偏、快速反应。此外,它支持三种操作模式:跟边、跟线和中心跟踪模式。
系统特点
1.支持三种操作模式:边跟踪、线跟踪和中心对准;
2.支持光电传感器、超声波传感器和CCD传感器;
3.智能检测传感器参数,在大多数情况下无需对传感器进行校正;
4.自动行程测量,无需机械限制开关;
5.没有冲出积分变PI算法,精度高,快速响应,误差少;
6.0.5ms超级响应速度;
7.模拟量传感器信号12位AD采样,700000次采样/秒;
8.采用FIR数字滤波器和回波差分滤波器,抗干扰能力强,信号稳定;
9.直流伺服电机驱动滚珠丝杆;
10.系统中所有状态下所有参数的断电记忆;
11.存储10组参数从不同的材料,方便快捷的切换材料;
12.简体中文/繁体中文/英文菜单操作;
13.人性化操作,快捷、简便。
技术参数
控制方式Control Method |
DC Servo Motor Driver |
电源Power |
DC 24V /5A |
控制输入Control Input |
DC 0~5A |
控制输出Control output |
3P,24V, PWM |
响应速度Response speed |
0.5 ms |
环境温度Environment temperature |
-10~60°C, below RH90% |
重量Weight |
1.2 kg |
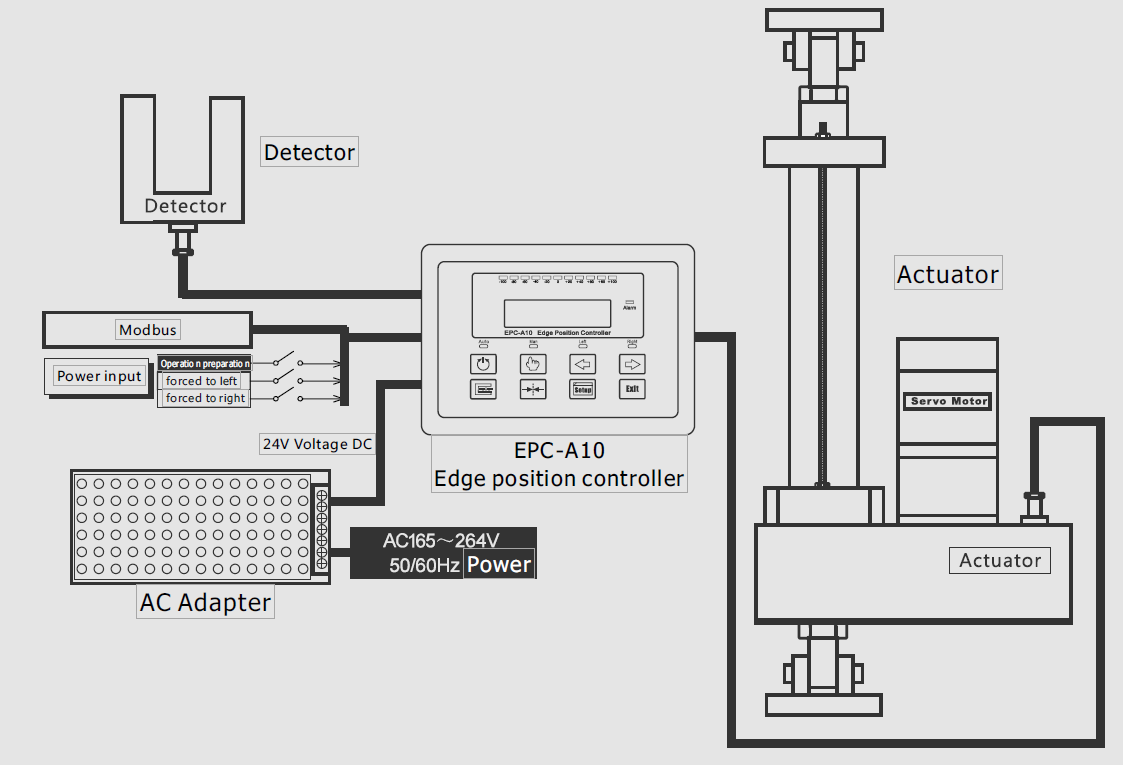
接线图
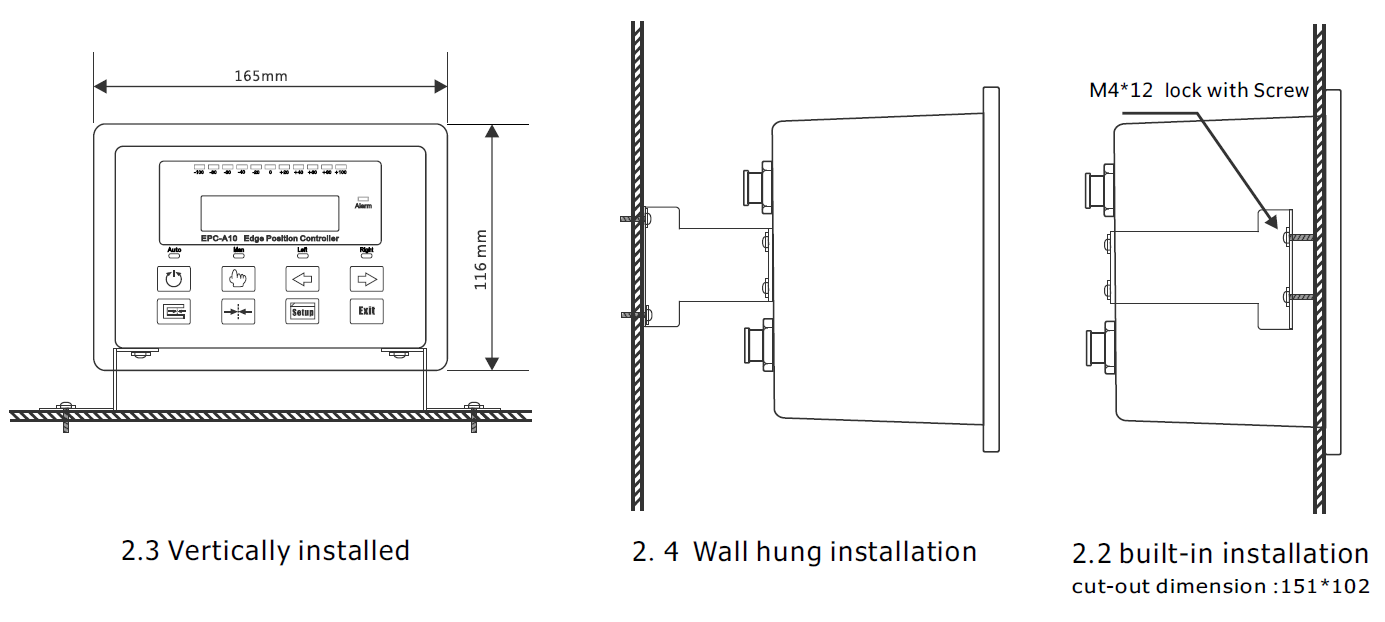
安装尺寸图
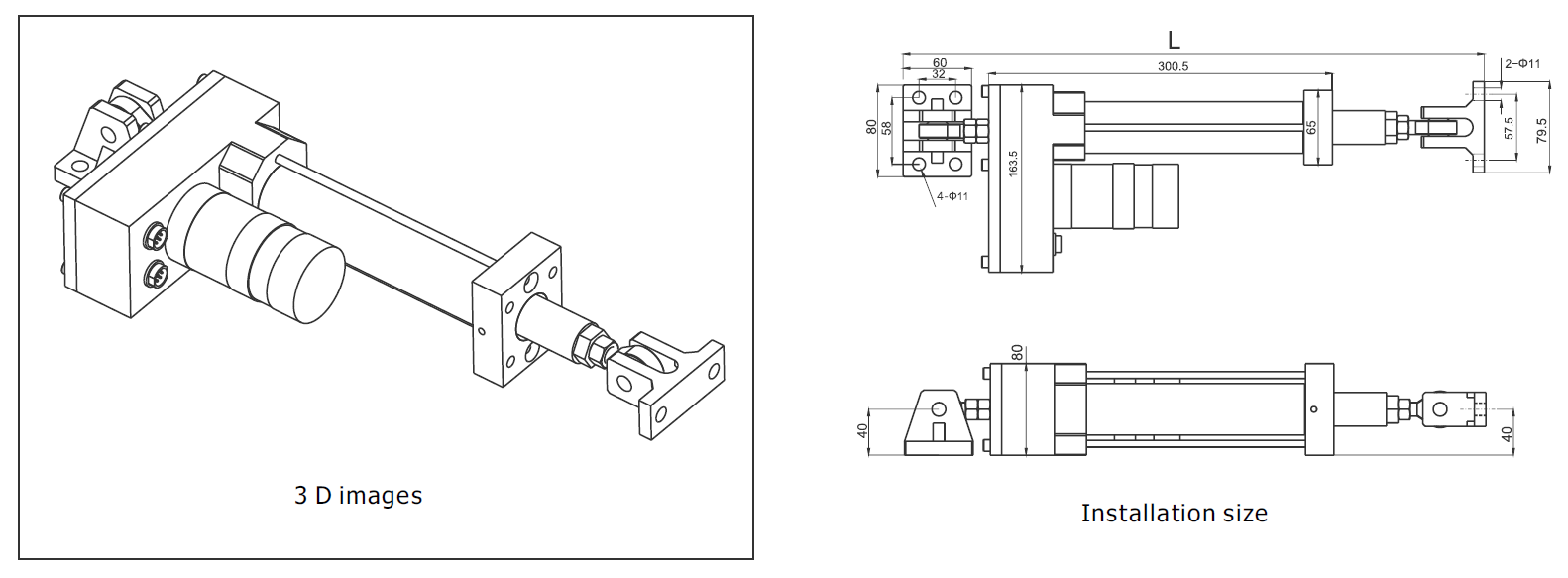
PD系列伺服电机驱动输出
伺服电机直线驱动器采用无刷直流伺服电机驱动。与其它电动机相比,具有效率高、速度快、响应时间短、起动转矩大、制动精度高、免维护等特点。传动部分装有高精度滚珠丝杠,效率高,回差少,精度高。它广泛应用于高速、高精度的跟边控制。
特点
1.无刷直流电机,免维护;
2.高精度滚珠丝杠使定位准确;
3.无需机械限位开关;
4.推力150Kg~200Kg。
技术参数
跟踪方式Tracking method |
Edge tracking |
电源输入Power input |
DC 10~30V |
输出信号Signal output |
Two-way 0~5V, Two-way NPN on-off signal |
检测范围Detecting range |
8mm(±4mm) |
可调精度Detecting precision |
± 0.02mm |
检测方式Detecting method |
Photoelectric correlation |
载波频率/响应频率 Carrier frequency/ respond frequency |
100KHz/1KHz |
防护等级Protection level |
IP54 |
重量Weight |
0.6kg |
环境Environment temperature |
-10~80°C, below RH90% |
外壳材质Housing material |
Aluminum Alloy |
伺服执行器工作参数
Model |
Travel |
Thrust |
Pushing loading |
Max. driving speed |
PD-104L80 |
80mm |
1KN |
1000kg |
40mm/s |
PD-104L150 |
150mm |
1KN |
1000kg |
40mm/s |
PD-204L150 |
150mm |
2KN |
2000kg |
40mm/s |
PD-204L200 |
200mm |
2KN |
2000kg |
40mm/s |
PD-403L150 |
150mm |
4KN |
4000kg |
30mm/s |
PD-403L200 |
200mm |
4KN |
4000kg |
30mm/s |
PD-803L200 |
200mm |
8KN |
8000kg |
30mm/s |

 Send Email
Send Email Jeremy Jing
Jeremy Jing Steven Xue
Steven Xue